Este exemplo mostra como medir a tensão RMS senoidal(a mesma da rede elétrica), para isto o circuito deve ler o valor de pico e calcular o valor RMS, neste exemplo eu calculo o valor de pico a partir da tensão RMS, mas pode ser fazer o contrario também, basta lembra que Vrms = VP/(1,41...) ou seja valor de pico dividido pela raiz quadrada de 2.
Um dos maiores problemas é ler a tensão 220V ou 110V diretamente com o PIC dai tem se as opções de recorrer a um chip dedicado a isso(que custa caro e é difícil de encontrar) ou usar um transformador(mas dai a corrente de magnetização e as próprias características elétrica do mesmo não são padrão, o que gerar certo retrabalho), então a forma mais simples foi usar divisores resistivos,mas dai teria que montar outros circuitos externos para manter o sinal em níveis desejado pegando os pulsos negativos e positivos, dai dentro das possibilidades de simplificar o projeto montei o seguinte circuito:
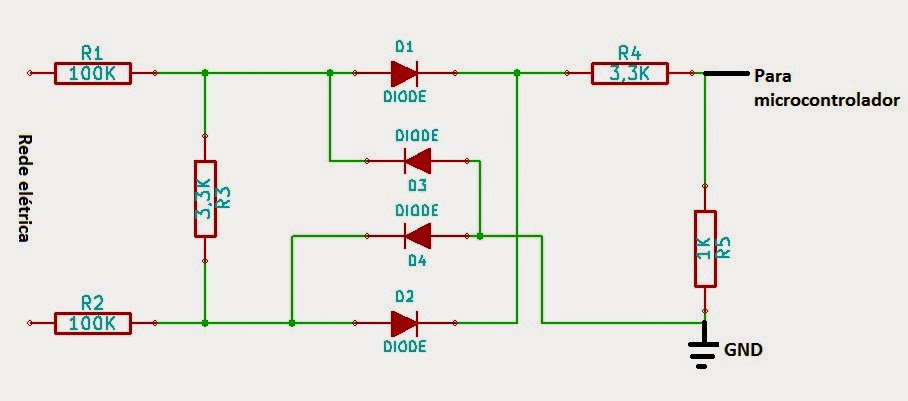
Caso não tenha experiência com eletrônica não monte o circuito físico("não me responsabilizo por eventuais choques ou danos materiais"), monte a seguinte tela de simulação no programa proteus:

Os resistores de 100K são para limitar a corrente e promover uma queda de tensão (isso evita que os diodos entrem em curto na sua região de tensão reversa), a tensão medida é o valor da queda de tensão no resistor de 3,3K(R3),após a retificação do sinal pelos diodos(1N4007) existe um segundo divisor de tensão que irá deixar passar uma pequena corrente suficiente para o microcontrolador ler.
Com este circuito nas mãos o próximo passo era ler diferentes tensões alternadas e montar uma equação que convertesse as unidades lidas pelo modulo ADC do PIC para o valor RMS.Um detalhe importante deste circuito é a captura do maior valor lido durante o período de uma senoide(adotei 25ms pois assim abrange uma faixa maior e pode operar tanto em 50HZ quanto em 60HZ).
No código você pode usar ele com o simulador ou com o circuito real(físico),basta comentar uma das linhas :
circuito_real(); // para usar o circuito fisico
simulador(); //para usar o simulador
Isso se deve pelo fato dos circuitos serem diferentes.
Segue abaixo o código fonte:
/* * voltímetro AC usando RS-232 no MPlab XC8 * * Compilador : MPlabXC8 * Microcontrolador: 16F877A * Autor: aguivone * Versão: 1 * Data : 12 de março de 2015 */
#include <stdio.h> #include <string.h> #include <stdlib.h> #include <delays.h> #define _XTAL_FREQ 20000000 // cristal de 20 Mhz #include <xc.h> /////////////////////////////////////////////////////////configuraçôes////////////////////////////////////////////////// #pragma config FOSC = HS // Oscillator Selection bits (HS oscillator) #pragma config WDTE = OFF // Watchdog Timer Enable bit (WDT disabled) #pragma config PWRTE = OFF // Power-up Timer Enable bit (PWRT disabled) #pragma config BOREN = OFF // Brown-out Reset Enable bit (BOR disabled) #pragma config LVP = OFF // Low-Voltage (Single-Supply) In-Circuit Serial Programming Enable bit (RB3 is digital I/O, HV on MCLR must be used for programming) #pragma config CPD = OFF // Data EEPROM Memory Code Protection bit (Data EEPROM code protection off) #pragma config WRT = OFF // Flash Program Memory Write Enable bits (Write protection off; all program memory may be written to by EECON control) #pragma config CP = OFF // Flash Program Memory Code Protection bit (Code protection off) ////////////////////////////////////////////////variaveis globais/////////////////////////////////////////////////////////// #define MAXIMO 20 //tamanho máximo de amostra deve ser numero par(e maior que 4) para funcionar // saiba que na verdade isso faz com que se tenha um impar(pois começa em 0) char caracter; bit flag_interrupcao = 0; float variavel_aux=0; unsigned long tensao = 0; void delay_ms(long val) { while(val>0) { __delay_ms(1);//resolve bug do compilador val--; } } ///////////////////////////////////////////////////interrupção////////////////////////////////////////////////////////////// void interrupt interrupcoes(void)//vetor de interrupção { if(RCIF) {//se interrupção de recepção da serial //aqui não será usado essa funcão caracter = RCREG; flag_interrupcao = 1; RCIF = 0;// limpa flag de interrupção de recepção } if(ADIF) {//se interrupção do modulo analogico! ADIF = 0;//limpa flag } } /////////////////////////////////funçoes usadas pela uart ////////////////////////////////////////////////////// void inicializa_RS232(long velocidade,int modo) {////por padrão é usado o modo 8 bits e sem paridade, mas se necessario ajuste aqui a configuração desejada. //verifique datasheet para ver a porcentagem de erro e se a velocidade é possivel para o cristal utilizado. RCSTA = 0X90;//habilita porta serial,recepção de 8 bit em modo continuo,assincrono. int valor; if(modo == 1) {//modo = 1 ,modo alta velocidade TXSTA = 0X24;//modo assincrono,trasmissao 8 bits. valor =(int)(((_XTAL_FREQ/velocidade)-16)/16);//calculo do valor do gerador de baud rate } else {//modo = 0 ,modo baixa velocidade TXSTA = 0X20;//modo assincrono,trasmissao 8 bits. valor =(int)(((_XTAL_FREQ/velocidade)-64)/64);//calculo do valor do gerador de baud rate } SPBRG = valor; RCIE = 1;//habilita interrupção de recepção TXIE = 0;//deixa interrupção de transmissão desligado(pois corre se o risco de ter uma interrupção escrita e leitura ao mesmo tempo) } void escreve(char valor) { TXIF = 0;//limpa flag que sinaliza envio completo. TXREG = valor; while(TXIF ==0);//espera enviar caracter } void imprime(const char frase[]) { char indice = 0; char tamanho = strlen(frase); while(indice < tamanho ) ///veja que o programa pode travar se aqui não tiver as duas aspas { escreve(frase[indice]); indice++; } } void long_to_char(long quant) { char convert_char6='0'; char convert_char7='0'; char convert_char8='0'; char convert_char9='0'; while(quant>=1000) { quant=quant-1000; convert_char6++; } while(quant>=100) { quant=quant-100; convert_char7++; } while(quant>=10) { quant=quant-10; convert_char8++; } while(quant>=1) { quant=quant-1; convert_char9++; } escreve(convert_char6); escreve(convert_char7); escreve(convert_char8); escreve(','); escreve(convert_char9); } ///////////////////////////////////////funçoes usadas pelo conversor AD////////////////////////////////////////// void inicializa_AD() { ADCON0 = 0X81;//freq. div. por 32(20mhz o que leva a 1.6us cada aquisição) ;habilita modulo de conversão' ADCON1 = 0X84;//leitura do valor justificado a direita,apenas RA0,RA1 e RA3 são portas analogicas. ADIE = 1;//não habilita interrupção de conversão analogica ADIF = 0; } // =================================================================================== // Função: _ler_adc_un // Parâmetros: não tem. // Retorno : unsigned long ultensao. // Descrição : retorna o valor lido em unidades de medidas. // =================================================================================== unsigned long ler_adc_un(void) { ADCON0bits.GO = 1; //inicia conversão while (ADCON0bits.GO_DONE == 1); //espera finalizar leitura return((ADRESH << 8) | ADRESL); } // =================================================================================== // Função: _Valor_pico // Parâmetros: não tem. // Retorno : unsigned long tensao. // Descrição : retorna o valor lido em unidades de medidas. // =================================================================================== unsigned long Valor_pico()//não colocar mais que 60 amostras { unsigned long tensao_temporaria; unsigned int conta=0; unsigned long tensao_maxima = 0; //tempo de 1 senoide completa em 50hz - mas funciona tambem em 60hz //caso queira apenas 60hz use o valor 166 while(conta < 2500)//tempo de amostra de 25ms(assim fica compativel com 50hz)) { tensao_temporaria = ler_adc_un(); if(tensao_temporaria > tensao_maxima)//pega sempre o maior valor valor de pico { tensao_maxima = tensao_temporaria; } __delay_us(10); conta++; } return (tensao_maxima); } // =================================================================================== // Função: _simulador // Parâmetros: não tem. // Retorno : não tem. // Descrição : faz calculo e joga na interface serial . //usado somente na simulação do proteus // =================================================================================== void simulador() { if(tensao != 0) //só trata se tiver lido alguma tensão { imprime("\n\r valor pico - valor RMS"); imprime("\n\r "); variavel_aux = (489*tensao)/10000; //para ter mais precisão - valor de pico long_to_char((unsigned long)variavel_aux); imprime(" - "); variavel_aux = (347*tensao)/10000; //para ter mais precisão - valor RMS long_to_char((unsigned long)variavel_aux); } } // =================================================================================== // Função: _circuito_real // Parâmetros: não tem. // Retorno : não tem. // Descrição : faz calculo e joga na interface serial . //usado para ler tensão de 0 a 350V(teorico pois só foi testado até 230V) // =================================================================================== void circuito_real() { if(tensao != 0) //só trata se tiver lido alguma tensão { imprime("\n\r valor RMS - valor pico"); imprime("\n\r "); variavel_aux = (((100*tensao) + 258)/278)*10; //para ter mais precisão - valor de pico long_to_char((unsigned long)variavel_aux); imprime(" - "); variavel_aux = (variavel_aux*141)/100; //para ter mais precisão - valor RMS long_to_char((unsigned long)variavel_aux); } } void main(void) { TRISC = 0X80;//configura portC C7 (pino RX) como entrada PORTC = 0; // limpar as portas que estão configuradas como saidas TRISA = 0XFF;//configura portA como entrada inicializa_RS232(9600,1);//modo de alta velocidade inicializa_AD(); PEIE = 1;//habilita interrupção de perifericos do pic GIE = 1; //GIE: Global Interrupt Enable bit imprime("Voltimetro RMS usando a serial!"); for(;;) { tensao = Valor_pico(); tensao = tensao + Valor_pico(); tensao = tensao + Valor_pico(); tensao = (tensao + Valor_pico())/4;//pega 4 amostras e tira uma media logo será 100ms //comente a linha que não for usar // circuito_real(); simulador(); delay_ms(500);//espera 0.5 segundo }//loop infinito }